
YouTuber extraordinaire Ahad Cove HATES taking out the rubbish, so he decided to hack a rubbish bin/trash can – let’s go with trash can from now on – to take itself out to be picked up.
Sounds simple enough? The catch is that Ahad wanted to create an AI that can see when the garbage truck is approaching his house and trigger the garage door to open, then tell the trash can to drive itself out and stop in the right place. This way, Ahad doesn’t need to wake up early enough to spot the truck and manually trigger the trash can to drive itself.
Hardware
The trash can’s original wheels weren’t enough on their own, so Ahad brought in an electronic scooter wheel with a hub motor, powered by a 36V lithium ion battery, to guide and pull them. Check out this part of the video to hear how tricky it was for Ahad to install a braking system using a very strong servo motor.

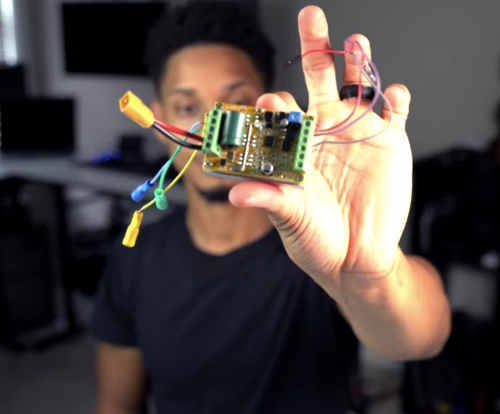
An affordable driver board controls the speed, power, and braking system of the garbage can.
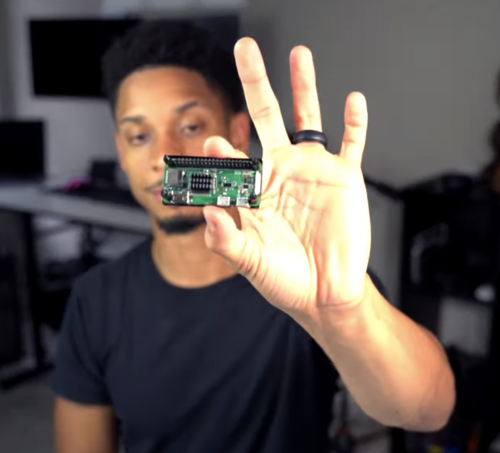
Tying everything together is a Raspberry Pi 3B+. Ahad uses one of the GPIO pins on the Raspberry Pi to send the signal to the driver board. He started off the project with a Raspberry Pi Zero W, but found that it was too fiddly to get it to handle the crazy braking power needed to stop the garbage can on his sloped driveway.
Everything is kept together and dry with a plastic snap-close food container Ahad lifted from his wife’s kitchen collection. Ssh, don’t tell.

Software
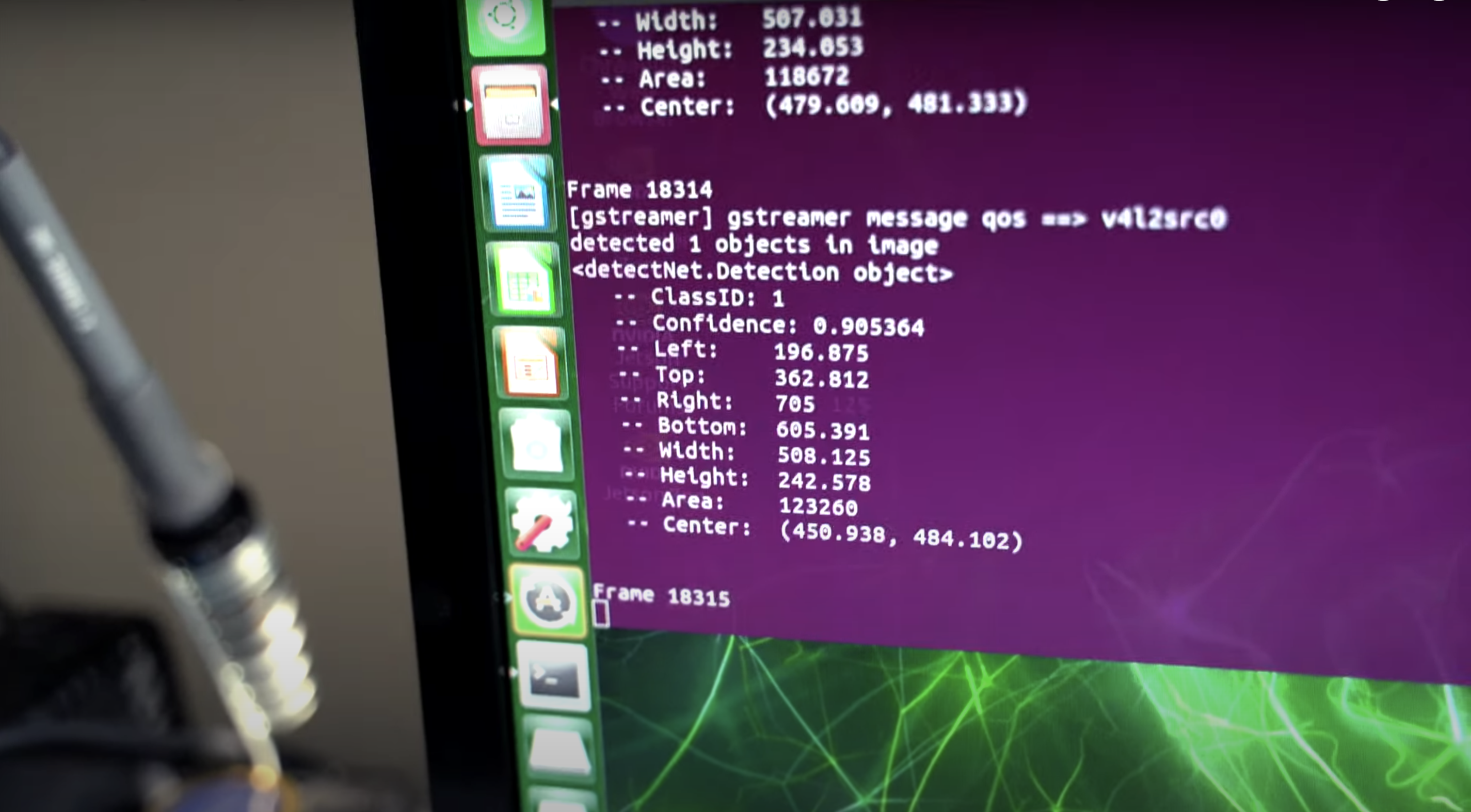
Ahad uses an object detection machine learning model to spot when the garbage truck passes his house. He handles this part of the project with an Nvidia Jetson Xavier NX board, connected to a webcam positioned to look out of the window watching for garbage trucks.
Opening the garage door
Ahad’s garage door has a wireless internet connection, so he connected the door to an app that communicates with his home assistant device. The app opens the garage door when the webcam and object detection software see the garbage truck turning into his street. All this works with the kit inside the trash can to get it to drive itself out to the end of Ahad’s driveway.

Check out the end of Ahad’s YouTube video to see how human error managed to put a comical damper on the maiden voyage of this epic build.
The post Self-driving trash can controlled by Raspberry Pi appeared first on Raspberry Pi.
from Raspberry Pi https://ift.tt/3hGlG0W




No comments:
Post a Comment
Please do not enter any spam link in the comment box.